
|
2.5. Condizioni generali di equilibrio per un corpo rigido
Può darsi che abbiamo trovato difficoltà nel risolvere i problemi precedenti, ma siamo decisamente degli esperti nelle applicazioni pratiche quotidiane. Iniziamo a pochi mesi dalla nascita a imparare come stare seduti e poi come rimanere in una posizione eretta, prima aiutandoci con un sostegno e poi autonomamente. Impariamo ad andare in bicicletta prima con l’aiuto di due ruotine aggiuntive e poi senza. Compiamo in ogni momento atti che ci permettono di rimanere in equilibrio nelle posizioni più strane. Certamente qualche volta "va male", ma l’esperienza insegna... |
|
Se un bimbo è più pesante dell’altro, quando si trovano alla stessa distanza dal sostegno, il più pesante rimane a terra e il più leggero sospeso in alto. Poichè così non riescono a divertirsi, anche senza aver studiato la statica, intuitivamente risolvono il problema spostandosi lungo l’asse: o il più leggero si allontana o il più pesante si avvicina fino a quando l’effetto dei loro pesi si compensa. Se pesassimo i bambini e misurassimo le rispettive distanze dal sostegno troveremmo che si ha equilibrio quando P1l1=P2l2. |
|
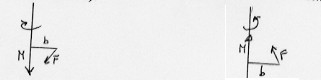
Consideriamo ora un uomo in automobile che muove il volante con le due mani. Se con ambedue le mani esercita verso il basso la stessa azione il volante è in equilibrio: |
|
FR=2F è applicata all’asse del volante ed equilibrata dalla reazione del vincolo. |
|
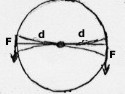
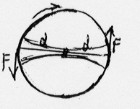
Un sistema di due forze parallele di intensità uguale e verso opposto prende il nome di coppia. |