|
3.3 Dinamica delle rotazioni Premessa Nei paragrafi Cap.3.1 e Cap.3.2 abbiamo preso in considerazione il caso di un corpo rigido che si muoveva di moto di traslazione, sottoposto ad una o più forze. Nel risolvere i problemi abbiamo sempre schematizzato il corpo con un suo punto (baricentro) e in questo punto immaginavamo applicate le forze agenti. L’approssimazione è corretta, perchè nel moto traslatorio tutti i punti del corpo rigido si muovono all’unisono con la stessa velocità ed accelerazione e su traiettorie equivalenti. Inoltre ci siamo sempre riferiti a sistemi di riferimento inerziali. Anche se non sempre è stato messo in evidenza, veniva sottinteso che ci riferissimo ad un sistema di riferimento solidale con la Terra o con il laboratorio, il che ci permetteva, nei casi considerati, di ritenere in buona approssimazione di trovarci in un sistema inerziale. |
|
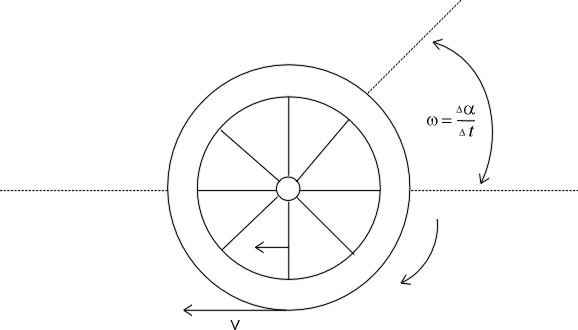
Se analizziamo invece le velocità con cui ogni punto si muove sulla sua traiettoria, notiamo che la velocità v varia con la distanza dall’asse. Abbiamo visto inoltre, nel Cap.2, che per far ruotare un corpo, per esempio intorno ad un asse, dobbiamo applicare una forza il cui effetto dipende però dalla distanza della sua linea d’azione dall’asse (braccio). Quindi quello che ci interessa è il momento della forza M rispetto all’asse di rotazione. Se misuriamo le accelerazioni angolari γ corrispondenti si ha che M/γ è costante, in analogia a quanto avevamo rilevato nel secondo principio della dinamica riferito ai moti di traslazione F/a=m. |
|
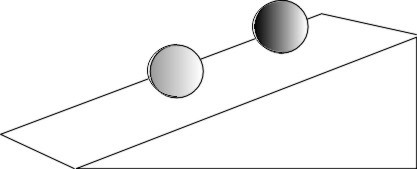
Se li poniamo alla stessa altezza come arrivano in fondo al piano? Il momento d’inerzia dipende da come la massa è distribuita nell’oggetto, ma anche dall’asse di rotazione. |